Essay: BattleMech Technology
Sarna News


This is a BattleTech Essay. Be advised that this Essay contains the advice or opinions of one or more BattleTechWiki contributors. This page is not an encyclopedia article, nor has it been thoroughly vetted by the community. While based in canonical facts (explicit, inferred, or deduced), it may also contain information that is merely educated guesswork and assumptions. A BattleTech Essay can therefore not be considered as a meta-source and is not a viable source or reference by itself. |
This essay was written by MekTek/MWO Mercs/MWLL forum poster Pht and posted here by him.
Contents
Overview[edit]
An in-depth look at the various technologies and systems of a BattleMech and their operation in concert with the MechWarrior to animate a BattleMech.
Internal Composition[edit]
BattleMechs have a large amount of articulation (joints). The basic design approach is to mimic the skeletal structure of humans by using an endo-skeleton. This means that most BattleMech systems are mounted to the exterior of the internals ("bones") instead of being caged in a frame. This is somewhat similar to how a human skeleton supports muscles, organs, and the rest of the human body. It is the internal structure ("bones") that support the whole structure. A 'Mech's armor only looks like it could hold it together... 'Mech armor is actually quite thin and unable to support much weight.
The Internals[edit]
'Mechs normally have around sixteen to twenty five bones. The low number of bones compared to human bone structure is due to couple of reasons. Some structures that encompass a dozen or more bones in a human—for example the ribcage—are a one-piece structure in 'Mechs. In other areas, simplified components serve the function of several bones—for example, the human foot is a very complex structure of bones, yet it is replaced effectively with simple shock pads. This structural streamlining results in 'Mechs generally being simpler and thus less articulated and flexible than a purely human bone structure would allow.
The exterior surfaces of the bones are configured to mount the assorted equipment that 'Mechs carry. Struts extend outward from the bones to hold the armor shell. Attachment points for the myomer "muscles" are built onto the bones. All of the internal structure (bones) are rigged for easy attachment of sensors and equipment.
Weapon mounting points—known as weapons frame attachments—are a custom-designed part of the internals of each BattleMech. Sometimes a bone is built around a weapon, and the weapon attaches directly to that bone, such as the Panther's PPC. Sometimes weapons are attached on an independent mount which "sits between" the weapon and the bone and is attached to both, such as the Shadow Hawk-K's shoulder PPC mount. Different weapon models (even of the same class, like two different models of medium lasers) require different mountings. For this reason there is always some customization, design, and engineering work required to mount different types of weapons, classes of weapons, or even different models of the same weapon class in any particular BattleMech. More complex swaps can and often do involve not just technical skills, but research, design, and engineering skills.
OmniMechs, however, are very different—so different that they are not usually referred to as BattleMechs. OmniMech weapons and equipment loadouts are much easier to customize because OmniMechs are designed to use a system of quickly swappable "pods."
OmniMech internals (other than their engines, cockpits, gyroscopes, and other basic structures) are designed to mount these modular "pods" instead of a specific loadout. All weapon systems and most equipment can be placed into an OmniPod. Mounting these systems into an Omni-pod is FAR quicker and easier than customizing the internal structure of a BattleMech to mount non-standard weapons or equipment. The "free space" in an OmniMech into which these Pods are mounted is referred to as its "pod space." Thus, OmniMechs are far more flexible in their roles.
The differences between BattleMechs and OmniMechs encompasses more than just changes to their internal structures ("bones"). However, these other differences are beyond the scope of this article and will not be addressed herein.
Standard Internals[edit]
Standard internals are formed of multi-part structures with a core of ultralight foamed aluminum, shrouded in directionally oriented stressed sheets of silicon carbide mono-filament fibers. The fiber layer is also rigged with structural sensors and data lines. This core is then clad with titanium-alloyed steel.
Endo-Steel Internals[edit]
Endo-steel internal structures are of the same basic configuration as standard internals, except that different materials used in their construction. Endo-steel structures are made of endomorphic steel, whereas standard internals are not.
Endo-steel is much stronger than standard internal structure, allowing endo-steel internals to be built with structurally thinner walls and no fiber wrap reinforcement around their core (they still have the sensor and data lines wired into them, though). These thinner endo-steel internals have the same strength as thicker walled standard internals—which results in a lighter structure.
The downside is that the thinner walls make endo-steel internals less stiff than same overall diameter of standard internals, which means that endo-steel bones must be made with larger cores. These larger cores are necessary because stiffness and strength are not the same qualities: for example a thick cardboard panel is stiffer... less likely to buckle under load... than a thin sheet of metal, even though the metal is far stronger than the cardboard. Endo-steel is stronger, but its thinner structures are far more likely to buckle, requiring a physically larger core to support the same amount of weight that standard internal structure can. This means that endo-steel internals are lighter, but bulkier.
Due to its composition, endo-steel must be made in zero-g to avoid chemical segregation (think of oil and water) which would severely weaken the alloy and make it brittle. Endo-steel's foamed aluminum core is also formed in zero-g, which promotes a more regular pore size, giving the core superior strength. Zero-g production makes endo-steel internals more expensive, but allows for the elimination of the fiber layer, meaning faster production than standard internals.
Actuators[edit]
'Mech joints are generally referred to as actuators. The term "actuator" refers to a 'Mech's joints (elbows, hips, etc.), myomers, and also the motor control units associated with these joints. The joints themselves are usually ball-type—like hips—or hinge type—like elbows—and are sealed and usually filled with dry lubricants, such as graphite or hexagonal boron nitride.
'Mech joints are moved by myomers in much the same way that human muscles motivate the structures to which they are attached. Each actuator also has a degree of local motor control and feedback, but actuators are too slow and too clumsy by themselves to provide the quick and fine movements necessary to maintain the BattleMech's balance.
Motor Control Units[edit]
Each individual joint has a Motor Control Unit (MCU) that controls it by sending electrical power to the joint's attached myomer bundles and monitoring feedback from the joint and its myomers. For redundancy, the power controls for the myomer strands are mounted at both ends of the myomers. The MCUs manage thousands of myomer fibers in each myomer bundle, contracting these fibers on demand.
The MCUs also monitor feedback from sensors wired into the actuator structures, which provides the MCU with the positional information of the joint relative to the rest of the BattleMech. The MCUs then take this positional information along with all known programmed movements and pulses (transfers) this information to the Diagnostic Interpretation computer (DI).
The entire group of MCUs together is known as the 'Mech Movement Sub-System (MMSS). The MMSS system receives data from the DI computer about the current tension, strength, position, and power usage level of all of the various myomers in the 'Mech, along with balance data from the gyro system and inputs from the battle computer. This data is used by the MMSS to complement the 'Mech's gyroscopic balance system, helping the gyro system to keep the 'Mech upright and stable under the varying conditions encountered on the battlefield.
For example, the MMSS system will "lean the 'Mech into" incoming kinetic fire in order to keep the 'Mech on its feet. The MMSS also compensates quite capably for recoil from firing the various weapons systems mounted to the 'Mech; as the 'Mech "knows" what weapons are about to be fired. The MMSS will even attempt to compensate for an earthquake.
While the MMSS system isn't capable of keeping a 'Mech on its feet, the individual MCUs that make it up are capable of self-adjusting a 'Mech's actuators at humanly undetectable levels without input from the MechWarrior. In fact, Clan actuator systems are advanced enough that they can adjust for a slight breeze, compensating by subtle shifts of the 'Mech to lean it into the wind.
Lastly, when a BattleMech is shut down, its actuators lock into place in whatever position they were in last. This can result in everything from keeping a 'Mech upright in its gantry to causing a 'Mech to lock up in mid-stride and fall over onto its face on a battlefield.
Myomers[edit]
Myomers are made up of microscopically thin polyacetylene tubes filled with a contracting substance. Each individual tube is extruded in microscopic form and spun into a bundle, along with others to form a myomer bundle. These bundles are laced with sensors and data/control lines. The contractile filling in the tubes—"acti-strandular fiber"—is produced by genetically engineered bacteria in vats. This acti-strandular precursor material is strained out of these vats, combined with specific polymer fillers, and then this combination is squirted into the polyacetylene tubes. The tubes are then electrified, causing the acti-strandular precursor material to arrange itself into complex nanoscale structures, somewhat like the contractile protein filaments (myosin and actin) in natural muscle.
When enough electrical energy is applied to activate a myomer bundle, its fibers contract in a process virtually identical to the contraction of protein filaments in natural muscles, except that the power is applied in a direct electrical form instead of an indirect chemical form. This contraction is an all or nothing process—the level of force generated by a myomer bundle is controlled by the number of individual myomer tubes contracted by their attached MCUs, rather than the amount of electrical current applied to each individual myomer fiber. Because myomers are far more powerful for their weight than human muscle and can be built on larger scales, they make 'Mech scale movement possible.
However, myomers are not merely 'Mech scale plastic muscles. Rather, they are very powerful electrical motors. For reference, the myomer bundles in a 'Mech's fingers are multi-kilowatt motors. The leg myomer bundles of a 'Mech are far more powerful (more massive—more fibers) than a 'Mech's finger myomer bundles. The downside of myomers is that they aren't efficient electrical motors—they have fairly high internal electrical resistance, which causes them to be roughly as wasteful of energy as natural muscle or internal combustion engines. Much of the energy required to activate a myomer is simply converted into waste heat. Myomer bundles are laced with a network of flexible tubing carrying coolant fluids to and from the BattleMech's heat sink system to dispose of this waste heat. How heat effects myomers is discussed more fully in the section on heat sinks below.
As an important side note, it is a misconception that lightning or PPC fire (which actually is nothing like lightning) can spasm a 'Mech and cause its myomers to rip apart. 'Mech structure and armor provides a very low resistance conduit to earth ground and as such will protect the myomers from the electrical energy. The Word of Blake 'Mech tasers work because they provide a much closer ground (lower resistance path) to the feed channel of the weapon—whatever is between the contacts (or is electrically connected to the area between the contacts) of the 'Mech-taser is subjected to massive electrical energy. By the way, it's the amps that do the damage, not the voltage. Voltage (potential) pushes, amperage (the number of electrons flowing) does the damage.
Triple Strength Myomers[edit]
"Triple strength myomers" are very much like normal myomers, but they operate more efficiently in a higher specific range of heat because of a simple endothermic chemical reaction within them. Triple strength myomers are also bulkier than normal myomers and more powerful for their size.
Gyroscope Systems[edit]
The 'Mech's gyroscope system (or "gyro") provides the swift, fine changes in force—the kinds of changes in force that the 'Mech's MMSS system cannot generate—which are necessary to keep a BattleMech upright and mobile. Without an active gyroscope a 'Mech cannot move—it will fall over if its pilot attempts to move it. A 'Mech that has its gyro destroyed in combat or when it is otherwise mobile will fall over and its pilot will not be able to get it up onto its feet. Even with multiple systems for keeping stable, incoming weapons fire and other conditions can make for a very rough ride for the pilot.
A 'Mech's gyroscope systems consist of balance-sensing mechanisms and force-generating mechanisms. Please note, it is the MechWarrior's sense of balance, as translated by the neurohelmet, that handles what the 'Mech's stability systems cannot interpret. The neurohelmet is discussed in its own dedicated section.
Balance-Sensing[edit]
The balance-sensing part of the gyroscope system usually encompasses a small computer with balance-sensing components in the 'Mech's cockpit. The balance sensors in this computer are of diverse designs—they can be laser ring gyroscopes, harmonic vibration gyroscopes, or even mercury bead setups. These sensors can also act as a 'Mech's inertial navigation system.
While these balance sensors are an effective system for keeping a 'Mech upright, they are fairly easy to fool. Extremely fast impacts to the sensors, or extremely fast changes in the 'Mech's weight distribution (such as having large amounts of structure or armor destroyed or removed in an instant), sudden changes in altitude, and especially the loss of one or more frames of reference (such as falling in mid-air—the loss of gravity as a frame of reference) can exceed their balance capabilities.
Also, 'Mechs are not good at determining when they should be off-balance, which is surprisingly useful and sometimes necessary in combat. Leaning away from an attack, or leaning into a physical attack, and a myriad of other tactics are essential on the battlefield.
Force-Generating[edit]
Located in the torso is a multi-ton assembly containing reaction wheels. Reaction wheels are spinning rings. This is the gyroscope proper.
The gyro is made of two major assemblies. The first is the housing, made of a carbon nanotube reinforced polymer inner shell and a light ceramic outer layer. The internally mounted reaction rings are made of carbon nanotube-reinforced graphite.
When a 'Mech loses its balance, the gyro mechanism will stop one of the (very) fast-spinning wheels and impart a reaction in the direction the wheel was spinning, or it will speed up a ring and as a reaction will impart a shove in the opposite direction of the push on the wheel in order to keep the 'Mech on its feet and upright.
Gyroscope configurations vary from manufacturer to manufacturer. Most gyros have at least three reaction wheels set at 90' degrees to each other. Some gyroscopes mount the reaction rings in a free-spinning sphere in order to avoid the reaction wheels inhibiting a BattleMech's movement with unwanted gyroscopic effects. This kind of design requires locking the outside sphere in order to use the reaction wheels. Some gyroscopes use six reaction wheels set up in three counter-rotating pairs, also to cancel gyroscopic problems. Neither of these designs is necessarily more capable than the other.
While it is not a part of a 'Mech's gyroscopic systems proper, the Diagnostic Interpretation computer (the DI is addressed in its own section below)—via its vast network of status sensors and attached myomer bundles—can attempt to compensate for incoming fire by having the 'Mech "lean into" it via the 'Mech's MMSS system. The DI computer also compensates for the recoil of the BattleMech's autocannons and other recoil generating weapons, in both instances in order to try and maintain the 'Mech's balance.
The Neurohelmet[edit]
The neurohelmet's main job is to enable the MechWarrior to control the balance of the BattleMech; any other things that a neurohelmet is used for are minor in comparison to this job.
The MechWarrior normally uses the neurohelmet to compensate for what the 'Mech's gyroscope and MMSS systems cannot handle, helping the 'Mech to "regain its bearings," and to tell a 'Mech when and in what direction it should be off-balance. The other things that the MechWarrior can use the neurohelmet to do will be addressed later.
Putting Data In[edit]
Advanced and modern neurohelmets are capable of providing some sensor and balance information to the MechWarrior. However, this "direct neural virtual reality" is very weak, because even the best neurohelmets can't put enough signal power into the brain to overwhelm the natural biological sensory signals without literally cooking brain cells. This input limitation is due to the wireless method that neurohelmets use to send information into the brain cells. At best, a well-trained and capable MechWarrior can use these inputs to gather a small amount of their 'Mech's kinesthetic and tactile sensor inputs and possibly some poor quality information to substitute for some other sensor displays.
The massive neurohelmets of the Succession Wars that sat on the shoulders of a MechWarrior and inhibited the MechWarrior's ability to turn their head are very different in configuration compared to more advanced or modern (3050 and later) neurohelmets.
These older and cruder neurohelmets required the use of an internal heads-up display (HUD), usually a 160' to 180' degree display showing a compressed a 360'degree view from external cameras and sensors, with the different weapons system firing arcs visually delineated and individual reticules for each firing arc where necessary. However, not all older neurohelmets were so crude—the first Star League did develop some very capable neurohelmets, the best of which were big clunkers used in aerospace fighters. These older highly advanced neurohelmets are very rare and well-used examples suffer from some nasty problems.
Modern and more capable neurohelmets, such as Clan versions, are smaller and lighter with larger visors. Because these newer neurohelmets allow the MechWarrior to turn their head they do not require the older style HUD display in the helmet visor... however, they can be modified to display one, if a MechWarrior so desires.
Neurohelmets also have audio systems which generate audible cues, alerting a MechWarrior to threats. Older neurohelmets used simple non-directional audibles, while modern neurohelmets generate audible cues in three dimensions, allowing the MechWarrior to quickly locate a threat.
Getting Data Out[edit]
Getting information out is less dangerous because it is a passive process—there is no risk of cooking brain cells. The Achilles' heel of getting complex information out of a brain via a neurohelmet is the great complexity of the human brain. Because of this, neurohelmets "watch" only a few specific centers of the brain which are easily translated into commands. The end result of this is an interface that makes it possible for MechWarriors to communicate their basic and simple intentions to their 'Mech more quickly and clearly than speech controls would allow for. However, this overall process is not fast enough or smooth enough to allow direct control over a 'Mech's movement.
For instance, when charging at another 'Mech, the pilot would use the neurohelmet to—at a very visceral and low level—command the 'Mech to throw itself off balance towards the targeted 'Mech; or a MechWarrior would be able to make certain that when picking up a fellow warrior in his 'Mech's hand that his 'Mech knows not to crush the relatively "squishy" warrior. MechWarriors that are very talented at communicating in this way with their neurohelmets can pull off some pretty impressive feats—witness the Noisiel Summer Games.
Neurohelmets often include the ability to change communications channels by clenching and unclenching the jaw, or opening the mouth fully.
Fine Tuning[edit]
Because of the plasticity (variability) of the human brain, it is necessary to fine-tune any given neurohelmet to its MechWarrior. Using a neurohelmet that is not tuned to you can cause anything from a minor buzzing sensation to a very nasty headache.
The Outside Limits[edit]
While the neurohelmet can help translate the MechWarrior's basic intentions to the BattleMech and give a small amount of sensory feedback to the MechWarrior, they aren't capable of real-time "mind reading" that would be necessary in order to directly control a BattleMech's movements or weapons systems—nor can they input enough data to a MechWarrior to replace the cockpit information systems.
The first Star League could not make helmets capable of this and neither can the Clans.
Armor[edit]
BattleMech armor consists of tightly bonded multiple layers. Only the outer (first) and inner (second) layers are actually armor. BattleMech armor is quite thin—millimeters to centimeters—in order to cover the large surface area of a 'Mech, and thus is not capable of bearing much load at all.
BattleMech armor usually consists of variously shaped plates of 'Mech-grade armor which are mounted to the struts that extend outwards from the internal structure of the BattleMech. These mountings and the armor plates are configured so that the armor plates overlap each other, leaving only relatively small gaps, usually just barely large enough for atmosphere or liquids to traverse.
There are other types of armor on 'Mechs besides the aforementioned armor plates. Actuator armoring can be made from a wide range of protective materials—ballistic or ablative fabrics to articulated plates of standard armor. Cockpit view screens use a large selection of transparent armors in combination, anything from ferroglass to alternating diamond and polymer sheets.
Standard Armor[edit]
The first and outer-most layer is an extremely strong, extremely hard layer of steel. This layer fragments projectiles. It also ablates and conducts heat to provide protection from energy attacks. The crystalline structure of this steel is carefully aligned and radiation-treated for maximum hardness and strength. Because of its phenomenal strength and hardness, the first layer suffers the tradeoff of being quite brittle—so brittle that the second layer of armor under it has to act as a backstop for shattered fragments of the outer layer.
The second and inner layer, cubic boron nitride (which is a very hard layer in its own right), is processed to avoid porosity, and includes a microfiber web of manmade diamond mono-filament fibers which imparts a little bit of flexibility to this second armor layer. The weave in this layer also incorporates sensor, data, and control lines. This internal layer back-stops molten armor from the first layer, and armor from the first layer converted into plasma by heavy attack. It is this layer that stops High Explosive Armor Piercing (HEAP) rounds and fast neutrons.
The third layer—which is not an armor layer—is a titanium alloy honeycomb. This layer is used to support the outer armor layers. As it has already been said, the first and second armor layers are proportionally very thin and thus not load-bearing. Because of this, it is the titanium honeycomb layer that holds the armor in place and (normally) keeps the brittle first and second armor layers from flexing.
However, when the outer layers are flexed too much, they will shatter like a pane of tempered glass; it is this tendency of the outer armor layers to shatter due to their extreme hardness that is one of the reasons why BattleMechs lose armor when they fall, suffer physical attacks from other BattleMechs, or collide with structures or other units. The comment about the difference between strength and stiffness from the description of endo-steel applies here as well.
The last and innermost layer is a polymer sealant, which seals off the gaps between the individual armor plates, making a BattleMech air tight and water-proof. The polymers used usually have some self-sealing capability (just enough to handle small punctures and gaps) and are heat resistant enough to survive the high internal temperatures of a BattleMech in combat. It is this sealing layer that allows a BattleMech to operate under water, in outer space or in other such extreme conditions.
Ferro-fibrous Armor[edit]
Ferro-fibrous armor adds a weave of diamond fibers to the outer steel layer itself. This is quite the trick because steel is a combination of iron and carbon—normally the diamond weave, which is pure carbon, would dissolve into the iron component of the steel in the outer layer. The techniques used to keep the diamond weave from melting into the iron component results in bulkier but lighter armor. Originally researched and made in the first Star League era, the technology became "LosTech" in the Inner Sphere for a long time. Inner Sphere ferro-fibrous armor doesn't shape well into anything other than flat plates due to its bulk. Clan ferro-fibrous armor is denser than Inner Sphere ferro-fibrous armor and is more capable of being shaped, allowing maximization of internal space in a 'Mech (this is one of the reasons why Clan 'Mechs tend to look different than Inner Sphere 'Mechs).
There are various types of ferro-fibrous armor in the Inner Sphere providing varying levels of protection by mass and weight. These variations are achieved by changing the amount of diamond fibers in the outer armor layer. Light Ferro-Fibrous Armor has fewer fibers. It is less bulky but also less protective by weight. Heavy ferro-fibrous armor has more fiber and has better protective capability by weight than even Clan armor, but its downside is massive bulk.
Stealth Armor[edit]
Stealth armor is a Capellan development that is actually a variation on normal ferro-fibrous armor. It is an attempt to duplicate the functions of the first Star League's Null Signature System. Stealth armor, though, has to use a separate Guardian ECM Suite in order to attain its capabilities and must incorporate a number of emission-suppressing materials that are fairly heavy, which makes it roughly as protective for its weight as standard armor. The suppressing effect is not attained through materials and equipment alone—the BattleMech's structure has to be set up to use stealth armor. Heat sinks are rerouted so they can be suppressed, corners and surfaces molded to control radar reflections, and internal baffles are used to mask the massive magnetic field of the fusion engine itself.
Fusion Engines[edit]
Fusion reactors generate huge quantities of electrical power by fusing light elements like hydrogen into heavier elements like helium. Nuclear fission, on the other hand, splits heavy elements like uranium into lighter materials.
The usual fuel used in modern fusion engines is normal hydrogen, the protium isotope to be specific. Historically, other fuels were used in early fusion reactors; anything from heavier hydrogen isotopes like deuterium and tritium, to the helium-3 isotope and even lithium. These heavier isotopes are easier to use, but the fusion engines that operated on them generated more nuclear waste than modern fusion engines.
In modern fusion reactors, the normal hydrogen used for fuel is extracted from any number of sources—particularly water. Because of this, most military fusion engines include an electrolysis unit to extract hydrogen from water (yes, it is possible to "refuel" a 'Mech with urine in the field).
In the early days, some BattleMech designers experimented with using fusion engines that produced more power than a particular chassis needed. The idea was that the extra power produced would provide some nebulous benefits in combat. This idea turned was not only false, but the oversized engines actually generated too much waste heat and would either cook off explosive ammo stored in the BattleMech or the engine safeties would cut in and automatically shut down the engine. A BattleMech can only use so much power; trying to force it to use more provides no extra benefits and simply does not work.
Containment and Power Generation[edit]
Fusion engines utilize a superhot (tens of millions of degrees Celsius) ball of hydrogen plasma, which they convert into helium to create energy. In order to keep the plasma ball from melting the engine, it is contained within magnetic fields. This is possible because plasma is electrically charged and, thus, it can be positioned and shaped by magnetic fields—there are magnetic fields generated inside the plasma ball and fields generated outside the plasma. In fact, the plasma never (normally) touches the walls of the engine. Fusion engine reactor chambers are kept in a vacuum to help insulate the 'Mech from the heat of the plasma and to help regulate the internal temperature of the plasma. Also, because punctured fusion engines are ruined by contact with superheated oxygen (this causes oxidization—"rust") fusion engine safety settings will normally stop the fusion reaction when the engine's external shielding suffers too much damage and is punctured.
Power is extracted in two ways—the first is called "magnetohydrodynamics" or MHD. The shorter and mostly correct description of this process is that the plasma is like a dynamo, generating electrical currents in conductor loops that wrap around the reactor. MHD directly converts heat from the fuel into electricity, and because this process operates at extreme temperatures it can exceed 90 percent efficiency in converting heat energy into electrical energy.
The second way of generating power is purely secondary and is called regenerative cooling, which uses waste heat to generate power. Usually this is done with a closed-cycle gas or steam turbine. In a small way, this is a part of the 'Mech's cooling system, even though this is not a part of the heat sink system proper—these are the so-called "free" heat sinks in the engine, and in configuration they are nothing like the other heat sinks mounted in the 'Mech elsewhere.
While the regenerative cooling machinery is very different from purpose built heat sinks, it still benefits from the materials and technology advances that have made "double strength" Heat sinks possible. The regenerative cooling system adds negligible volume to the engine, because it uses the existing plumbing of the engine's cooling system. It would be quite useful if all the waste heat from an engine could be soaked up by these so-called "integral heat sinks," but practical limitations mean only so much energy can be extracted from this lower-quality energy source (bigger engines make more waste heat and can have larger regenerative cooling systems); most 'Mechs require the use of some conventional heat sinks placed elsewhere to handle the leftover heat that is not converted into energy.
It is important to note that excessive heat from combat or other conditions can cause the magnetic fields that contain the plasma to be disrupted. If this happens there is the potential for an uncontrolled fusion reaction, which could irradiate the insides of the BattleMech and expose the MechWarrior to lethal levels of radiation.
Shielding and Fusion Engine Types[edit]
All fusion reactions generate radiation; they irradiate their interiors, which causes problems when the reactor must be serviced or decommissioned. Because of this, radiation shielding is the largest portion of a 'Mech scale fusion engine's mass.
Standard fusion engines use a very dense ceramic for shielding, usually tungsten carbide reinforced with short boron ceramic fibers mixed into the carbide. This shielding is actually thick enough to survive battle damage and disperse the heat from the plasma should the magnetic containment fields fail (allowing the plasma ball to expand and touch the walls).
Extralight (XL) fusion engines reduce the mass of the tungsten carbide reactor walls, but reinforce them with an oriented-crystalline plastic that creates a bulkier—but lighter—engine. Making large blocks of this shielding is very difficult for engine manufacturers and the scrap rate is prohibitive, which accounts for some of the high price of XL engines.
So-called "light engines" use layered shielding materials and secondary magnetic screens. They are not quite as light as XL engines but they are less bulky.
Engine Cooling Systems[edit]
Fusion engines also have their own integral cooling system, in addition to their regenerative cooling systems. These other cooling systems are separate from the rest of the 'Mech's heat sink network. Liquid nitrogen jackets are used over key components, which allows minimal engine operations without having to activate the external heat sink systems. Any other use of the engine requires the larger cooling capacity of the main heat sink and regenerative systems.
Fusion engine explosions[edit]
This is an urban legend that will not die: fusion engines going critical and exploding as mini-nukes.
The magnetic fields which contain the plasma also protect the plasma from the frigid (relative to the temperature of the plasma) reactor chamber walls. The fusion reactions in a BattleMech fusion reactor only occur in a very narrow band of temperature and pressure conditions. The hotter and the higher the pressure, the faster the reactions occur.
When heat is added to a gas, it expands. If it can't expand, its pressure goes up. Thus, when the reactions spike a bit the plasma gets hotter and, in turn, tries to expand. However, the magnetic fields aren't rigid so they will expand a little a bit, allowing the plasma ball to expand, which, in turn, lowers the pressure in the plasma - which cools the plasma and allows it to collapse to its normal size. There is a little bit of extra room in the reactor chamber for just this reason.
There are, however, other ways the reaction can cool down. If the magnetic fields don't do their job, the plasma ball can actually touch the frigid walls of the core which results in the plasma ball "blinking out." This barely even scuffs the walls of the reactor. When the plasma ball contacts with the frigid walls of the fusion reactor the fusion reactions in the plasma stop almost instantly because there is no stored thermal mass in the plasma ball. All of the heat in the plasma comes from active reactions. The multi-ton reactor walls (comparative to the plasma ball) have so much thermal mass that they can soak up the heat of the reaction and barely heat up. The plasma ball does not normally have enough thermal energy to do more than add a little heat to the walls of the engine around it.
Fusion reactors do on very rare occasions die in a spectacular manner, but the majority of those times isn't due to an exploding reactor.
What normally happens is that the reactor core is breached, allowing a large quantity of relatively cold air into the vacuum of the reactor chamber which puts out the fusion reaction instantly... but in so doing, the intruding air in the reactor chamber soaks up all the heat and comes blasting back out in a white-hot blinding gout of flame. Considering that it takes massive damage to breach a reactor core so quickly that the safety fields can't drop down before something intrudes into the chamber... the visual end effect is that the 'Mech has very nearly been blasted in half, followed very quickly by a blinding fireball. This is a spectacular way to decommission a fusion reactor—a rampaging superhot oxygen flash fire—but it is not a nuclear blast.
In the final instance, it will happen that a MechWarrior will figure out that they can overcharge the engine, causing the plasma ball to heat up to an amazingly high temperature—far beyond their normal operating range—and than [sic] kill the magnetic field quickly, causing the extremely overheated plasma to hit the reactor walls which causes the reactor lining to explosively evaporate. The result of this is that the reactor is overpressurized, which causes a respectable explosion—but again, not a nuclear explosion.
Cooling Systems[edit]
Heat Effects[edit]
BattleMechs are sealed and insulated vehicles, allowing them to fight under nearly any conditions. This prevents heat from venting off and BattleMechs have a lot of heat to shunt from the continuous megawatts of power they consume, not to mention heat from weapons fire and possibly their external environment. Excessive heat can impair or even damage a BattleMech's computers, electronics, myomers, and sometimes even cause the breakdown of its heat sink systems and their coolant fluids!
High heat levels can also be dangerous to the safety of the MechWarrior, causing heat stroke and even death. High heat levels can even cause the magnetic fields in the 'Mech's fusion engine to fail, exposing the 'Mech and its MechWarrior to lethal levels of radiation. Excess heat can also cause any stored explosive ammunition to cook off explosively—always a catastrophic event for the 'Mech and its MechWarrior and sometimes destructive to nearby units.
Incidentally, myomers impose one of the primary limitations on the temperature a BattleMech can operate at, because as they heat up, they become more electrically resistant, less efficient, and less predictable, all at the same time. This translates into a 'Mech moving sluggishly and erratically and having trouble bringing its weapons to bear. In fact, if myomers become too hot, they will actually cook themselves, which results in the black smoke seen rising from extremely overheated BattleMechs in combat. The acti-strandular materials in myomers do not respond well to high temperatures.
Heat Sinks[edit]
There is quite a bit of confusion about what BattleMech heat sinks really are. "Heat sink" is actually the wrong name, as they are actually heat pumps. However, the rest of this article will continue to use the term "heat sinks" instead.
Heat sources[edit]
'Mech fusion engines generate waste heat because the balancing act of keeping a reaction going often results in more reactions being produced than are needed for current energy demands. These extra reactions create waste heat, since they aren't converted into electricity by the engine's regenerative cooling systems. Energy weapons are inefficient at converting electricity into laser or particle beams, ballistic weapons create heat in their bores and barrels, and jump jets create a lot of waste heat. Lastly, myomers generate a large volume of comparatively lower temperature waste heat. There are also of course external sources of heat—hostile units with flamers or inferno SRMs, surrounding forest and structure fires, weather conditions, and more.
Collecting Heat[edit]
Fusion engines and weapon systems have cooling jackets hooked up to tubes carrying coolant, which are networked into their frames. These tubes connect to the heat sink network. Myomer bundles have coolant lines laced through them in a manner not unlike a vascular system. All of these coolant lines run into collection systems that connect to the heat pumps and radiators that dump the heat.
Coolant fluids differ, depending on the manufacturer of the heat sink. Oils, chlorofluorocarbons, water-based solutions, liquid nitrogen, gaseous nitrogen, gaseous helium, and other formulations are used. There are no 'Mechs using molten metals like the Tharkad City fusion engine—that would simply be too hazardous in combat. The coolant solution is circulated through the 'Mech by a wide variety of pumps. Most modern heat sink systems no longer use mechanical pumps; instead they use myomer-wrapped flexible tubing that pulses ("peristaltic"), resulting in circulation. This setup is more tolerant of damage than centrally located mechanical pumps. In addition, the whole system of coolant lines employs many computer-controlled cut-off valves to stop catastrophic loss of coolant due to damage; computer controls can also reroute coolant around damaged systems.
Heat Pumps[edit]
Heat pumps collect and condense heat until it can be easily shunted out through the radiator component end of the network, even into environments hotter than the 'Mech. Many different sorts of heat pumps are used by different manufacturers. There are vapor-compression systems, sonic cooling systems, magneto-caloric systems, expansion compression systems, heat expansion systems, and others.
Dumping Heat[edit]
At one end of the heat sink assembly is the radiator. BattleMech radiators aren't very different from car or refrigerator radiators. Radiators consist of finned tubing carrying hot coolant which they cool with air or water passed over the outer surface of the radiator. BattleMech radiators are usually made of graphite, which is five times more thermally conductive than copper. These radiators are always hidden under armored grills. Some Periphery nations have had to resort to using copper for their radiators; it actually works fairly well due to thinner construction, meaning more surface area from which to radiate heat. The net performance drop from using copper radiators is fairly negligible. Copper radiators are also easier to repair.
The wonder plastics of the first Star League had a big hand in enhancing radiators. While these semi-crystalline polymers don't quite have graphite's thermal conductivity, they are dramatically lighter, allowing larger radiators for the same mass as standard heat sinks. This what [sic] allows for "double strength" Heat sinks. Unlike most recovered Lostech in the Inner Sphere, these double strength heat sinks did not originate from the Helm Memory Core. The New Avalon Institute of Science was experimenting with this tech before the Helm core was found. The Clans never lost this technology and they even improved it by making the material more crystalline, thermally conductive, and physically compact, but resulting in a more brittle radiator. The required reinforcements to compensate for this brittleness keep the Clan double strength heat sinks at about the same mass as Inner Sphere versions, while being about one third the overall size.
Radiators are why "heat sinks" actually have to use heat pumps. The laws of thermodynamics state that heat flows from hot to cold. Thus, if your 'Mech is operating in an environment hotter than its internal temperature, the radiators would actually send heat into your 'Mech's coolant system.
Jump Jets[edit]
Jump jets work by ingesting atmosphere via a system of turbo compressors to be used as reaction mass in reaction chambers. The system hits the ingested and compressed reaction mass with electron beams powered by the magnetohydrodynamic tap from the fusion engine, which converts the compressed reaction mass into an explosion of plasma. This superheated plasma is then channeled through a magnetically sealed venturi baffle, resulting in a controlled and concentrated flow out of the jump jet exhaust port.
BattleMech jump jets don't add plasma vented from the fusion engine - only aerofighters do this. Because jump jets work with plasma, their reaction chambers closely resemble fusion reactors, right down to the magnetic containment fields.
Jump jets can only be run for so long because they normally ingest oxygen-rich atmosphere for reaction mass—the superheated oxygen would destroy the assembly very quickly if it were continuously used; it simply runs too hot. BattleMechs normally carry a small supply of reaction mass—usually hydrogen, water, or mercury—in order to operate where there is no atmosphere; however, they don't carry enough of this spare reaction mass to achieve flight.
Jump jets will not work underwater. This is because firing a jump jet filled with incompressible water generates enough pressure to rupture even the toughened jump jet casings. Jump jets cannot use stored reaction mass under water either—the jets will not work with water plugging their nozzles.
Major Computer Systems & Sensors[edit]
Battle Computer/Targeting & Tracking system[edit]
The Battle Computer ("BC"), located in the cockpit, controls, coordinates, and monitors all weapons Targeting and Tracking (T&T) systems, and it does so by taking inputs from the DI computer and the MechWarrior. It is the BC that makes sure any given weapon is aimed at what the MechWarrior is indicating with their reticule. It is the BC that does the targeting calculations based upon sensor inputs—calculations which result in the positional data that is used to physically align each individual direct-fire weapon, or give firing coordinates to homing weapons, in order to hit whatever the MechWarrior is tracking with the reticule at any given range. The BC also controls the Target Interlock Circuits (TIC) of the 'Mech.
BattleMech Targeting and Tracking systems consist of more than just the BC—the T&T system also includes a network of sophisticated sensors, sub-computers, and complex software programming, and each individual direct-fire weapon mounted in a 'Mech has—as a part of its mass and bulk—components that allow the BC, via the T&T system, to individually and physically aim that weapon beyond the mobility of whatever part of a 'Mech in which it may be mounted. Any homing weapons systems (LRMs, for example) are also coordinated with or by the BC. These computers, software, and physical weapon alignment systems are what allow a BattleMech to automatically change the point at which its weapons-fire will converge in order to attempt to hit what its pilot is tracking with the reticule on their HUD.
The BC doesn't just control a BattleMech's weapons systems—it also serves to coordinate the overall movement of the BattleMech by making sure the MechWarrior's various commands have priority. It also is the "gateway" that filters the data from the DI computer, converting that data into information readouts that are useful for the MechWarrior so that they do not need to interpret it.
There are many types of sensor that the BC handles—thermal imaging, light amplification, radar, laser tracking, UV tracking, and magnetic anomaly inputs are generally used as primary sensors, supplemented by seismic sensors, motion detectors, chemical analyzers, microwave, visual tracking, and many others, depending on what equipment a 'Mech mounts. However, because the BC filters, prioritizes, and compresses this information, MechWarriors are not overwhelmed with raw data. Normally this data is displayed on the cockpit HUD displays or on the neurohelmet HUD with all the various selected sensor information synthesized into a single streamlined viewing mode, with important things tagged by the computer with graphic icons onscreen.
Sensor readouts can either overlap a target or reveal an area. For example, thermal sensors display a green (cold) to white (hot) image of the battlefield. The MechWarrior can opt to display other 'Mechs with thermal imaging and leave the battlefield in true colors. Extra sensor readings can be added to or subtracted from the displays as the MechWarrior wishes. Normally the battle computer will synthesize all of the various sensor inputs onto the display, although in a simplified form.
Identify Friend/Foe (IFF) is a key ability of the BC/T&T system. It eases the burden of identifying targets for MechWarriors in battle conditions, especially in poor visibility. Friendly and enemy 'Mechs are tagged with differing graphic tokens. IFF broadcast beacons are used by the BattleMech's Targeting and Tracking system to avoid accidental missile fire at a friendly 'Mech, though the system can be manually overridden.
BattleMech sensory processors and programming stand out in their ability to recognize other units and classify them by type and as friend or foe. Virtually all BC T&T suites can tell what type of unit is being detected, and can even make educated "guesses" at what variant that unit is. The system is surprisingly intuitive and at times it will present an interesting "guess." For example, the famous Inner Sphere naming of the Clan's Timber Wolf OmniMech: the first Inner Sphere BattleMech to encounter one "saw" it as a cross between two designs it already knew—the Marauder and Catapult designs, thus the name "Mad Cat" was born.
BattleMechs can also share some sensor data. Specialized C3, C3i, and other hardware takes this to new heights, but all BattleMechs can at the least handle basic sensory data from friendly 'Mechs in order to pinpoint enemy positions, or share more detailed information. This is usually done with a separate communications channel, and can be difficult to maintain during battle.
In a pinch, the BC can stand in for the DI computer, but this reduces the amount of information gathered and degrades the overall performance of the BattleMech to about 60% of normal. This translates to 60% of the sensors giving "old" or inaccurate data and weapons systems being unable to track and accurately hit whatever the pilot is indicating.
Diagnostic Interpretation Computer[edit]
The DI computer is the "highest" managing computer in a BattleMech—it coordinates all of the varying computer systems in a BattleMech. All other interpretive computers and all sensors are subordinated to the DI computer. Even though the BC is the channel for MechWarrior commands that can and do override the DI computer's programmed routines, the BC and its system are still otherwise sub-ordinate to the DI's management.
The DI consists of a network of distributed computers that monitor and coordinate the majority of the internal functions and components of a BattleMech. As noted earlier, the internal structures, armor, actuators, myomers, and other components are wired with sensors and data/control lines. The DI computer uses this network to monitor the health and status of all components in this network. In doing this, the DI tracks the 'Mech's state of readiness and feeds this to the Battle Damage Assessment computer (BDA), which in turn translates and displays this information on readouts for the MechWarrior.
However, the DI handles more than simple status assessment. The DI also uses its network of lines as a back-up data feed to other components. For example, if a BattleMech's hand is dangling by a piece of armor, the DI can determine the status of the finger actuators through data lines in the armor. While the BattleMech would not be able to do much with the hand, it would be able to communicate with it. This capability allows BattleMechs to function even as they suffer from massive internal damage. The DI computer itself is quite redundant and damage resistant. The DI locates some key hardware in the cockpit, but the rest of its hardware is scattered throughout the BattleMech, closer to systems the DI hardware controls. These sub-processing units are set up with multiple redundancies and are capable of managing systems for other damaged DI sub-systems. For example, DI computers located in the engine might wind up handling leg actuators after a penetrating shot lobotomizes the DI processors in the legs. It is the DI, via sensors attached to the ammo bins in a 'Mech, that activates the automatic pilot ejection system in the case of an ammunition explosion.
The DI can stand in for a damaged Battle Computer, but the 'Mech operates at about 70% of its normal effectiveness.
Manager[edit]
The DI computer manages all of the systems in a BattleMech. All 'Mech components have their own controlling sub-computers which are brought together by the DI system. The DI, for example, sends commands to actuator MCUs in order to promote smooth limb motions. Each weapon system sub-computer will send its state of readiness or malfunction to the DI computer. More advanced DI computers will indicate to the MechWarrior what the cause of the problem is and try to fix the malfunction, all with no input from the MechWarrior. The DI also keeps the 'Mech from damaging itself. For instance, it will cut back on systems that generate heat when the 'Mech suffers from heat sink damage or is in a very hot environment. It is also capable of overriding the "common sense" programming of the component level systems. When the MechWarrior demands it, the DI will run the engine hot even if the engine control computer is trying to keep the engine cool. It is the DI computer, as manager, that coordinates all the systems called for when a MechWarrior pushes the throttle forward—it is the DI that controls the engine power, the gyro, and coordinates the actuators. When a BattleMech takes damage, the DI is what re-configures leaking heat sinks and coolant lines, bypasses severed myomers, and tries to re-route power to disconnected weapons.
Security[edit]
The DI computer also handles a 'Mech's dedicated security measures. Normal security routines involve the MechWarrior thinking their way through several commands while wearing the neurohelmet, along with audible voice code phrases. Codes can also be typed in from a 'Mech's keyboard. Older security routines had a MechWarrior move their 'Mech through a set of 'Mech gesture "code keys."
The DI computer uses these inputs to decide whether to allow a would-be pilot to activate and control its 'Mech. If a 'Mech's owner is particularly vindictive, they can program their DI computer to scramble a would-be thief's brain with the neurohelmet if they do not pass the 'Mech's programmed security checks. Incidentally, Clanners do not normally utilize these extra security routines, since, according to them, "there are no thieves in Clan society."
The neurohelmet's custom pilot-tuning profile is also used as a part of the security system of a 'Mech. Any would-be thief must also match the neurohelmet's profile, or they most likely will not be able to pilot the 'Mech.
Systems status sensors[edit]
BattleMechs have an extensive network of status sensors that send information about various systems up to higher-level systems. The internal structures, myomer, armor, and other systems are laced with sensors and data lines connected to the various computer systems of the BattleMech. Sensors will transfer their information across any part of the 'Mech's internal data network that is not damaged. This sensor information is usually sent via multiple routes, in case one route is damaged. 'Mech sensor networks are very redundant.
There are jump jet ready indicators, ammo low/critical indicators, heat build-up, proximity warning, incoming transmission warnings, IFF engaged/disabled, limb overstress indicators, engine shielding sensors that track the status of the fusion reactor core and magnetic shielding, armor sensors, and various others.
BattleROM[edit]
All of the sensor, MechWarrior physical condition, and communications data are recorded into a capable "black box" computer that can survive virtually any kind of damage, from an ammo explosion to a failed orbital drop. This is the so-called "BattleROM" box. It uses "read only" (ROM) memory chips, which are very hard to modify in the field. Because of this, BattleROM data is used for courts-martial and other such sensitive proceedings. BattleROM boxes usually record the last 200 active hours of a BattleMech. These "black" boxes are (rather ironically) usually painted with highly reflective paint so they may be easily found.
Cockpit[edit]
BattleMechs are ground vehicles, yet their cockpits are more similar to those of aerospace fighters than other types of units. Inner Sphere cockpits normally include features tailored towards long engagements. Clan cockpits, however, do not usually incorporate these features, and are smaller and narrower, reflecting the Clan ethos of efficiency and short, brutal campaigns.
Life Support[edit]
BattleMech cockpits are sealed, pressurized, and equipped with life support systems. There is a lot of gear that must be built into a cockpit, and this limits the amount of volume and mass available to use for life support systems. BattleMech life support systems are not capable of unlimited air and water recycling—there simply isn't enough weight and space available to build systems that can do so. 'Mechs can operate for a few hours to several days in a vacuum, depending on their design. In environments with oxygen or water, the life support system can make oxygen as long as the fusion engine is running. In order to achieve this, the life support system pulls in oxygen through filters or uses an electrolysis system to separate the oxygen out of water. If the 'Mech is shut down, most life support units have ports for conventional personal battery packs that can keep them running for hours.
The filtration systems in common use around the time of the late Succession Wars, however, are not capable of filtering out the chemical weapons used by the Word of Blake, and many 'Mechs at the time of the Jihad still use these older systems.
Climate control systems are of utmost importance in BattleMechs. Although it is very rare, 'Mech cockpits can get too cold for the pilot. There are fusion-powered heaters that kick in to bring the temperature up to levels that are more comfortable. The vast majority of time a 'Mech cockpit bears more resemblance to a sauna; overheating is a serious issue. BattleMech cockpits have stout cooling systems, but unfortunately, 'Mechs can and do run hot enough to heat the cockpit up to unsafe levels.
Because of this heat problem, MechWarriors universally don a suit of cooling tubes when they pilot a 'Mech. These suits hook up to the 'Mech's life support systems in the cockpit in order to carry away enough heat to keep the MechWarrior safe in extremely hot conditions. These wearable cooling systems run the gamut from crude bunches of tubing forming a vest of sorts (Succession Wars era) to extremely well built and capable full body suits (first Star League era). In fact, 'Mech cockpits can get so hot that if the life support systems aren't functioning the pilot can be killed by the heat, although if they are functioning modern life support systems are normally capable of preventing heat stroke. This heat problem is why MechWarriors who don't have the most advanced cooling suits usually pilot their 'Mechs wearing uniforms more appropriate for a baking beach than the cockpit of an armored combat vehicle.
Amenities & Storage[edit]
Most BattleMech cockpits have storage lockers for rations, field gear, medical, and other supplies. They will also have a sizable amount of water for the MechWarrior's use in a cooled or insulated container. Larger cockpits are sometimes well-equipped with amenities, such as small microwave ovens, refrigerated food storage, and even sleeping and sanitary amenities for extended engagements in the field. Most command chairs have a small storage locker for emergency supplies, in the case of command seat emergency ejection.
Many 'Mechs have a foldout passenger seat; some 'Mechs even include a full ejection seat for passengers and give them access to some controls, such as communications systems. Most Inner Sphere BattleMechs have one more seat in the cockpit—a foldout toilet. Most 'Mechs dispose of the waste via a high-powered electrical arc or microwaves, and will capture water produced by incineration for flushing the waste out; the amount of endurance a 'Mech has in the field can be limited by how much toilet paper a MechWarrior chooses to carry. Spartan Clan cockpits rarely have toilets.
In terms of ergonomics and layout, there is no such thing as a truly "standard" cockpit. Layouts vary between manufacturers. That said, there is enough similarity between cockpits that a MechWarrior can usually acclimate to the controls of a new BattleMech in a short amount of time.
Configuration[edit]
Configurability, or the lack thereof, is a source of much debate. Inner Sphere 'Mech designs tend to go through cycles of either being setup with multi-function displays and programmable switches or being setup with fixed displays and single function switches. Fixed-function setups are somewhat more damage tolerant in that one destroyed control won't take out an entire suite of functions, and switches never change location, so they're "quicker to operate." Ironically, adjustable control setup proponents also claim reflex advantages. They say this because a MechWarrior can customize his controls and displays to suit his preferences, which supposedly allows for quicker operation. In reality, the difference in speed is not much, if it even exists. This is mostly because MechWarriors have so much to learn just to qualify to pilot a 'Mech that they don't alter their control setups. In fact, standard training 'Mech layouts are very similar between the Clans and the Inner Sphere. Thus, virtually all 'Mech cockpits and default configurations are similar. OmniMechs, though, practically require configurable and customizable controls.
Displays & Audibles[edit]
While 'Mechs have dashboard and primary HUD displays, neurohelmets have often used an internal HUD. The average MechWarrior will customize the way the data is presented to them in their cockpit. These preferences can be saved on the BattleROM chips that MechWarriors usually carry, in order to transfer settings between 'Mechs. Audible cues and verbal commands are also used to control a BattleMech.
BattleMechs have typically had excellent speech recognition systems capable of understanding commands from their MechWarriors, even when they're screaming in combat, wounded, or are otherwise engaged. Most Inner Sphere MechWarriors use this speech recognition only for 'Mech security. Audio cues are usually handled via speakers mounted in the neurohelmet that generate either a simple monotone warnings, or 3-D positional alarms to help a MechWarrior quickly locate threats.
Controls[edit]
The actual controls for a BattleMech are fairly simple, regardless of the complexity of the average BattleMech. This is not because of the ignorant idea that the MechWarrior links directly with the BattleMech through the neurohelmet. BattleMech controls are simple because the 'Mech handles the majority of the mundane details of operation. 'Mechs usually have a throttle, foot pedals, and one joystick - some will add a second joystick.
Again, not all BattleMechs will have the exact same setup, but most 'Mechs utilize control setups fairly similar to each other, much like how most ground car controls (steering wheel, brakes, accelerator, shift control, light and wiper controls, etc.) are similar.
Provided for reference, the cockpit control setup of a T-IT-N10M Grand Titan, produced by Earthwerks Incorporated, circa 3054:
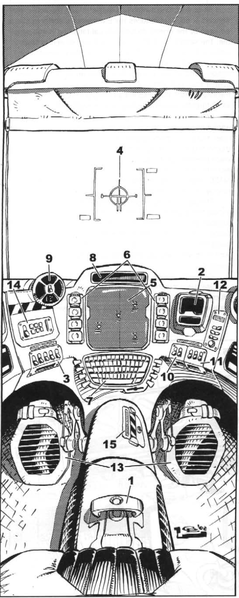
On the left[edit]
1- Access Hatch Controls - Used to seal the cockpit in order to keep intruders out, or to activate the emergency blast release system that unlocks the hatches.
2- Water supply, in an insulated removable container.
3- Food storage.
4- Medical kit.
5- IFF (Identify Friend or Foe) transponder bank, where the 'Mech's IFF circuit card is.
6- Left weapons status display, displays information for half of the 'Mechs weapons. Ammunition counts, reload status, and energy-using weapons recharge status are shown here. The Target Interlock Circuits (TIC) for half of the 'Mech's weapons are controlled here by a series of toggle switches.
7- Primary Cockpit HUD viewing mode controls. One switch here toggles the 'Mech's sensors between active and passive state. Another switch here toggles the display of IFF readouts on the main HUD, another toggles the searchlight function, and the last switch toggles Infrared (IR) tracking mode.
8- Throttle: Forward movement is achieved by moving the throttle forward. Reverse movement requires pulling the throttle backwards with the reverse mode toggled on. The throttle is locked in place whenever the thumb button on the throttle is not depressed. 'Mechs equipped with Myomer Acceleration Signal Circuitry (MASC) will have a second thumb toggle on the throttle to control this system.
9- Speaker/microphone controls: This is where the MechWarrior activates or deactivates the microphones in their neurohelmet, cockpit, or the 'Mechs external mics. Internal and external speakers are controlled from here as well.
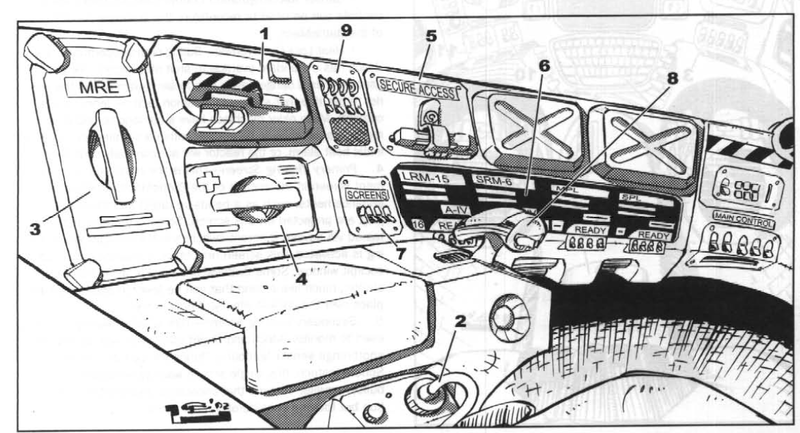
In the center[edit]
1- Emergency ejection handlebar: Activates the explosives panel blow-outs on the cockpit and than [sic] triggers the rockets in the command chair in order to blast the MechWarrior free of their 'Mech. Some more advanced 'Mechs blast their entire head assembly off instead of just the command chair (for instance, the Hatchetman). Clan cockpits usually locate the emergency ejection handlebars on the top sides of the command couch.
2- The Computer Message Replay: this displays a visual readout from the DI computer of damage to critical systems, such as heat damaged equipment and dangerously weakened armor.
3- Main Control Rocker switches: These have various functions -
- Cross-hair (reticule) window limiting toggle - Overrides normal Targeting and Tracking behavior allows the MechWarrior to track a target with the reticule out to the extreme edges of the HUD, beyond the normal firing pattern of the weapons systems.
- Reverse Movement Mode toggle - Used in conjunction with the throttle to enable backwards movement.
- TIC (Target Interlock Circuit) Reconfiguration toggle - unlocks the current TIC setup which allows the MechWarrior to reconfigure the TICs via the side weapon status display controls.
- Sensor Reconfiguration toggle - Unlocks the current sensor scanning configuration so that it may be reconfigured.
- Heat Lock-Out Override toggle - Stops the 'Mech's computer systems from locking out the 'Mech's ability to fire its weapons systems when the 'Mech is dangerously overheated.
4- Primary View Screen: a polarized see-through screen where the main HUD is projected—this is usually the front window/viewing port on the cockpit. This screen shows a 360-degree view compressed to the width of the screen. This view is generated by the 'Mech's computers from all of its various sensors, thus giving the MechWarrior situational awareness all the way around his 'Mech. The weapons aiming reticule is displayed here, along with other information from the Targeting and Tracking/BC computers. Target lock quality is usually indicated by color-coding of the reticule. Red is normally indicative of poor or no weapons tracking, gold (along with an audible) is usually indicative of the best weapons tracking, and alternating colors indicate that only some weapons have tracking. Sensor display modes, various indicators, and icon tags are also possible on this screen. Information about movement is also displayed here. This screen will also automatically darken in response to blinding flashes. There is a pull-down curtain mounted above this screen.
5- Secondary View Screen: Displays 'Mech status, target status, long-range sensor sweep readout, and short-range sensor sweep readout.
6- Secondary View Screen Controls: Only one of these mode switches can be used at a time. Their functions -
- Short range sensor sweep - This displays a sensor sweep with a two- km sweep. Normally used in this mode are heat sensors, movement sensors, and sensors tracking fusion engine radiation signatures. The scanning 'Mech is displayed in the center of the screen, with sensor contacts displayed around the scanning 'Mech in a top-down form of view.
- Long range sensor sweep - Displays a 32-square km map. This map is usually built from information that the Battle Computer pulls down from satellites (if there are any available). Terrain features, friendly 'Mechs, and enemy 'Mechs are shown on this map. No details about these features and 'Mechs beyond their location are shown if they are outside of the 2- km sensor sweep range (unless a C3/C3i system is in use and a friendly so-equipped 'Mech is within 2 km of the contact).
- Armor Damage status - Displays armor damage information relayed from the DI computer to the Battle Computer. This information is read out in a visual outline of the 'Mech, with damage indicated by shades from red to black.
- Internal Damage status - Shows a readout of damaged weapons and/or internal equipment. This information is also shown in a visual outline of the 'Mech. A blank screen in this mode indicates no internal damage. Any component outlined in yellow indicates it is damaged. A red outline indicates a destroyed component.
- Enemy armor damage status - The same as for the scanning 'Mech, except information is given from scanned targets.
- Enemy internal damage status - The same as for the scanning 'Mech, except information is given from scanned targets, and the internal heat levels of the targeted 'Mech are also shown.
- Beagle Active Probe sweep - Reads out the information gleaned from the 'Mech's active probe (if the 'Mech is so equipped), showing shut down or concealed 'Mechs and other concealed units on the battlefield, along with more detailed information about targeted units.
7- Battle Computer keypad & disk/chip input slot: used by the MechWarrior to control and reprogram the 'Mech's DI and BC computer systems. Information entered here is displayed on the Secondary View screen. Normally the MechWarrior uses this keypad to activate the 'Mech's anti-theft security routines. Also, the DI and BC computer's functions can be switched here to compensate for each other if one of them is taken out of operation. More complex programming, such as rigging sensor ghosts, is usually done off of the battlefield via hookups to external computers and hardware. The disc/chip input slot is accepts discs with embedded chips and is usually used to transfer customized programming to the BC or for initiating full system reloads.
8- Heat scale: This shows the level of waste heat built up in the 'Mech on a scale that runs from "safe" (green), to "risk" (yellow), to "danger" (red).
9- Anti-Missile Warning System: A large red warning light that engages when incoming missiles are detected. There is also a readout for the amount of AMS ammunition available and a control switch to activate/deactivate the AMS system.
10- 'Mech Kick Control switches: When these are activated the foot pedal controls can be used to control kicking instead of maneuvering. There is one switch for each leg.
11- 'Mech Punch and Grab switches: When activated these convert the firing (main) joystick over to physical combat/movement mode for the 'Mech's arms. The first two switches activate the physical combat mode for an individual arm. The third switch activates physical combat mode for both arms in which both arms carry out the same commands at the same time (usually used for pushing and charging attacks). In 'Mechs with dual sticks, each stick controls an individual arm, allowing for greater control by the MechWarrior.
- Punching - Punching is carried out by activating the switch for the desired arm or arms, aiming with the reticule on the main HUD, and pulling the main trigger. Manipulation of the weapons control stick enables the execution of simple jabbing and more powerful punches; while punch and grab mode is enabled, the control stick can move up and down as well as left and right. BattleMechs with two control sticks can control both arms individually at the same time via the activation of both punch and grab switches.
- Clubbing - Aimed and triggered in the same way a punch is.
- Grabbing - 'Mechs are generally programmed well enough to recognize when they should punch and when they should grab. Grab commands are aimed and triggered similar to punches. Clubs and other weapons (makeshift or purpose built) are locked into the 'Mech's hand by fully closing/compressing the hand controls that the 'Mech uses (these controls are listed out below).
- Other modes - more dexterous movements:
- Older 'Mechs use either a pair of waldo gloves placed on either side of the command chair or sensors built into the MechWarrior's gloves in order to execute more deft hand movements; the 'Mech simply mimics the MechWarrior's gestures while these systems are activated.
- Newer 'Mechs utilize more capable and complex actuator programming along with input from touch-sensitive surfaces on the control stick (or sticks) in order to carry out all but the most complex movements. However, for very fine movements—such as those involved in some combat engineering—newer 'Mechs still have to use the same pilot-gesture-movement mimicking setup that the older 'Mechs did (the comments from section 5.2 also apply here).
When any single one of or any combination of the 'Mech's kick or Punch and Grab modes are switched on, the 'Mech gives the neurohelmet finer control over the gyroscope system; neurohelmet also feeds the 'Mech supplemental balance controls specifically constructed for the 'Mech's Kick/Punch/Grab routines.
12- Gyroscope start-up and calibration control: Activates the gyroscope system and transfers gyroscopic balance control to the neurohelmet. There is also a manual control for offloading a limited amount of the balance chores to the gyroscope system if the neurohelmet should be damaged in combat.
13- Foot movement Control Pedals: Located on the cockpit floor at the front. These are normally used to control which way the 'Mech turns. They also activate the 'Mech's jump jets (if it is so equipped), and control the 'Mech's legs while kick-mode is activated. To turn the 'Mech to the left, you press down on the left pedal; to turn to the right, press down on the right pedal.
More complex movements can be done with the foot controls—they can be unlocked and move on other axes besides just up and down—for instance, to get the 'Mech to side-step.
In order to activate the 'Mech's jump jets, you quickly press down fully on both pedals; doing so again will deactivate the jump jets. Directional control while jumping is usually achieved with the foot pedals. More complex air-borne maneuvers involve the use of the joystick—for instance, the reticule on the HUD can be used pick a landing point. The jump jets achieve this directional control by feathering or by the use of control surfaces.
14 - DI computer access and Main DI control panel: The controls allows the MechWarrior to activate or deactivate the DI computer. This panel is normally only opened by techs when they have to access the DI system.
15 - Security control circuit box: Placed down near the foot pedals, this holds the ROM circuitry, on which the 'Mech's security access codes are stored.
On the right[edit]
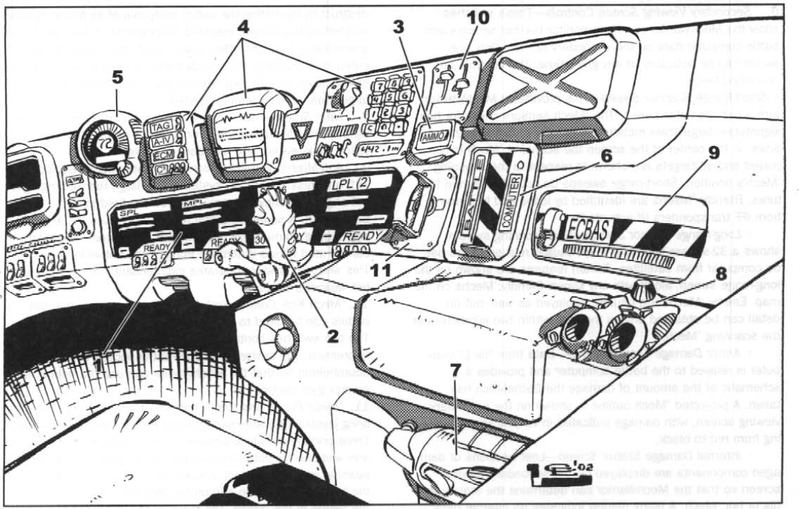
1- Right weapons status display, displays information for half of the 'Mechs weapons. Ammunition counts, reload status, and energy using weapons recharge status are shown here. The Target Interlock Circuits (TIC) for half of the 'Mech's weapons are controlled here by a series of toggle switches.
2 - The Main Control Stick: This is the primary control for targeting the 'Mech's weapons systems. It also controls the 'Mech's arms. It has firing triggers for each of the target interlock circuits (TIC) - up to as many as six triggers.
Weapons aiming is achieved by the MechWarrior using this stick to manipulate the reticule on the primary view screen HUD. This does not happen in a "click the desired target and the 'Mech then tracks it (with the reticule or otherwise) for you" way—the MechWarrior must use the reticule to track their desired target until they pull the trigger(s) for weapons fire. BattleMechs are explicitly programmed to NOT choose any target, or track any target. BattleMechs only "track" the reticule. This means that the reticule does not indicate to the MechWarrior where the 'Mech's individual weapons are currently aimed—rather, the reticule indicates to the 'Mech what it should be trying to aim its weapons at.
The finger rests on this control stick are touch/pressure sensitive and are used to help control the 'Mech's hands when the physical mode toggles are activated. When in physical mode the joystick unlocks and can move up and down as well as side to side.
3- Emergency ammo dumping control: used on conjunction with the left and right weapons status displays to eject unused ammo.
4- Communications panel: Used to interact with and control the various communications and other networks which the 'Mech is capable of interacting with. These networks can be conventional RF (radio frequency), satellite, microwave, laser link, or land line hookups; along with the various secure communications modes these networks use. In addition to the controls located on this panel some neurohelmets include sensors that facilitate channel switching by sensing when a MechWarrior clenches or unclenches their jaw, or when they open their mouth fully. This panel also controls ECM, Tag, C3/C3i, standard jamming modes, communications interception and decryption, and Artemis IV/V fire control systems.
5- Life support controls: These control the cockpit environmental systems and give a readout of the cockpit temperature and life support systems status.
6- Battle Computer: The access panel for the battle computer.
7- Fire extinguisher
8- Coolant lines hookup and control: This is where the MechWarrior's coolant vest is attached to the 'Mech's life support systems. It also has controls for coolant flow rate.
9- The emergency cockpit blast away system: This fires the explosive bolts on the cockpit view ports so that they fall away—but it does not activate the MechWarrior ejection system.
10- Cockpit Light controls
11- Ignition switch: This large red bar is used to bring the fusion reactor up to minimal operational levels, which powers the gyro and cockpit systems for BattleMech start up. It locks into place upon start up.
The rear cockpit wall[edit]
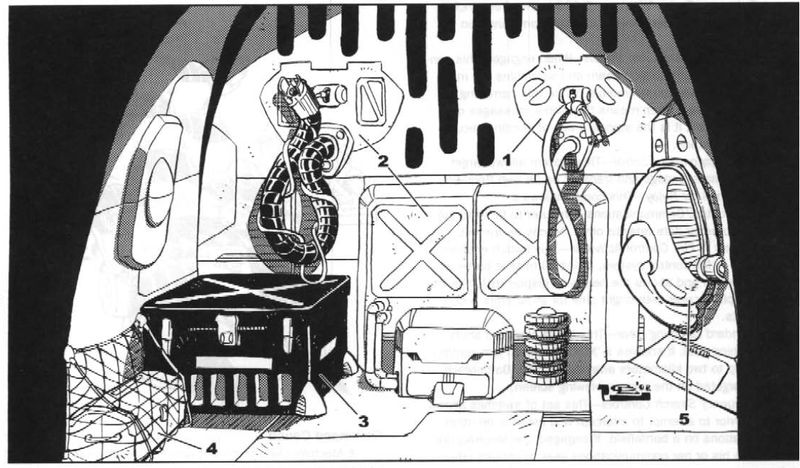
1- The neurohelmet cable hookup, known by the acronym NCCI. This hookup is designed such that the cables will break away cleanly if they do not automatically disconnect in the event of emergency pilot ejection.
2- The air supply and recirculation system which contains about ten hours of air in tanks and a recirculator which filters and brings in external air when in a safe atmosphere.
3- Personal gear locker
4- Tool Rack & Net - A 'Mech field repair kit is usually stored here.
5- The potty
The command Chair[edit]
These are designed to move in order to compensate for shocks and they have a full seat belt harness to hold the MechWarrior in place. Built into the seat is an emergency rocket ejection system, a parachute or rockets for landing, a homing beacon under the seat cushion, and a small storage locker which usually contains flares, a jumpsuit, and some other emergency supplies. There is also a pistol holster (most Clan 'Mechs don't have this feature). The seat cushions double as personal flotation devices.
Overall 'Mech functionality[edit]
Structure, actuators, and myomers for mobility; armor for protection, gyroscope and MCUs for coordination, the fusion engine for power; the commanding cockpit; the Battle Computer for targeting and tracking; and all of the other systems in the 'Mech. Given that the neurohelmet cannot function as a direct brain-machine link, the question is—what coordinates all these systems and unifies all of their functions together into a smoothly functioning and capable armored combat unit? The DI computer.
BattleMechs are actually quite capable and well-programmed robots, with most of that capability stemming from the DI computer network and its programming. A BattleMech's computers handle a massive amount of lower-level decision making so that the 'Mech can be piloted by a single person instead of a crew. For instance, the Battle Computer system sorts, processes, and translates sensor data into a simplified format and then displays it for the MechWarrior, such that they need only look at the readouts to ascertain the situation on the battlefield.
While it is the MechWarrior who must indicate what is to be targeted and has to track what is to be targeted, and decides when to fire the 'Mech's weapons (and does so by using the main weapons control stick to aim a reticule on the targeting display) it is the BattleMech that actually does, in real time, the calculations as to where to aim its weapons and then it is the BattleMech that must actually physically aim its weapons at the target the MechWarrior is aiming at with the reticule on their HUD.
It is the BattleMech that does the majority of recoil compensation and compensates for blasts of incoming hostile fire. While a MechWarrior can help the BattleMech keep its balance, for instance, by "telling" the 'Mech when to ride with recoil rather than leaning into it, or when to throw itself off-balance at another 'Mech, it is still the DI that handles most of the decision-making when it comes to balance chores.
Moving is yet another task where the BattleMech does most of work. Though a BattleMech may have proportionately large feet, it still must choose every footstep with care in order to compensate for outside forces or in anticipation of environmental features. Again, it is the DI that handles this, via a 'Mech's many sensors. Hand actuators are also tools that the BattleMech will handle via the DI network, especially more modern 'Mechs, which are programmed with very capable and complex actuator routines. BattleMechs will actually move their limbs and torso to avoid collisions. The agile movements of a light BattleMech threading its way through a forest is not only the result of a talented MechWarrior, but the 'Mech's own DI computer avoiding the trees.
All of that said, 'Mechs are not built or programmed to be autonomous, mostly because they carry a prodigious amount of firepower and are physically so large. In fact, MechWarriors must handle all of the higher-level decisions, essentially handling "higher level thinking" and balance tasks for their 'Mech. This is why BattleMechs do sometimes simply crash their way through forests, clip buildings, or trip down into ravines. BattleMechs are programmed to obey their pilots, regardless of the "common sense" programmed into the 'Mech. For instance, a 'Mech will swing its arms through the side of a building if that is what's required to bring weapons to bear on a target. BattleMechs will give collision warnings, but they don't override their pilots. Ironically, this is one of the reasons why it takes a long time to train good MechWarriors. MechWarriors actually have to learn how to think for their 'Mech and exploit the machine's "intelligence" in order to get the results they want.
Bibliography[edit]
- Classic BattleTech Companion: pp. 233–246, section by Mike Miller
- TechManual: pp. 31–43: "BattleMech Tech: A Primer," section by Mike Miller